

Lopako Delta D3PM-2200-P25
Huahana Huahana
ʻano ʻano
1、 ʻOi aku ka liʻiliʻi o ka manawa pōʻaiapili maʻamau ma mua o 0.67s, e like me kāu noi no ka wikiwiki kiʻekiʻe a me nā hana kaumaha.
2、Hoʻolālā kiʻekiʻe o ke kolu axis motor ma ka neʻe ʻana i ka plat-form, hiki i ka robot ke hoʻokō maʻalahi i ka pololei rotation kiʻekiʻe.
3、He kūpono ka robot no nā hana kaumaha, a me ka wikiwiki a me ka pololei kiʻekiʻe.
Nā Kūlana Huahana
| ʻAno | D3PM-2200-P25 | |
| Koʻi | 3+1 | |
| Uku uku | 25 kg | |
| Mea hoʻopunipuni | Kaumaha | 153 kg |
| Anawaena | 2200mm | |
| Hiki hou | Kūlana | 0.05mm |
| Ka hoohuli ana | 0.05° | |
| Māmā Māmā | 180pp/min | |
| Laulā Kauliuli | ±360 | |
| ʻAe ʻia ka manawa kiʻekiʻe o ka inertia | 0.224kg .m2 | |
| Kikoki kihi o ka lima hana | I luna | 33.2º |
| Iho | 78.5º | |
| Lako ikehu | 380VAC ʻEkolu -10%~+10%, 49~61HZ | |
| Kaha mana | 15KVA | |
| Mana i helu ʻia | 9.2kw | |
| Ka Mahana Waihona | -10 ℃~70 ℃ | |
| Kaiapuni Hana | -10℃~50℃,RH≤80% | |
| Palekana | IP55 | |
Huahana Huahana
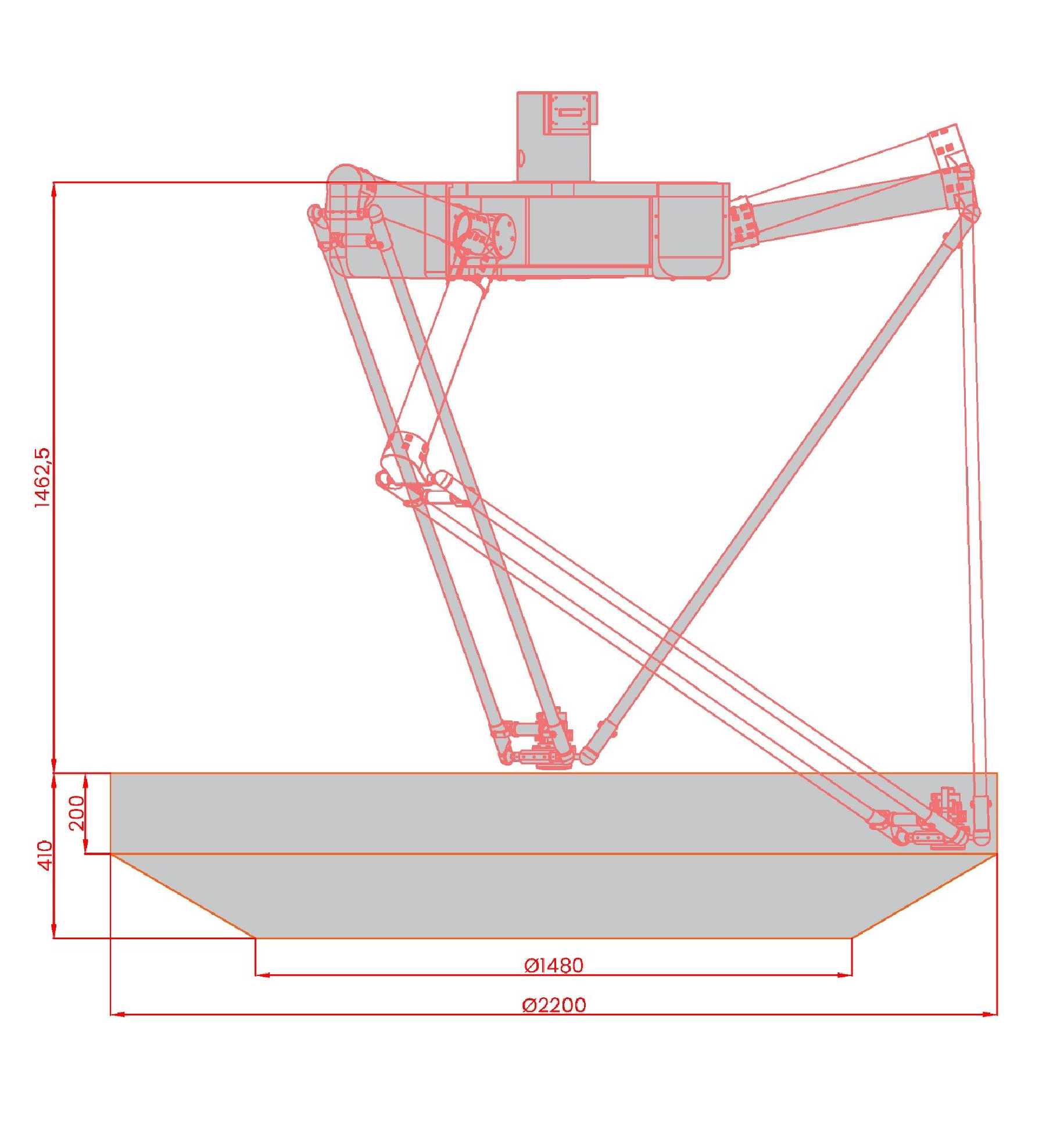
01. Nā ʻāpana a me ka laulā hana (mm)
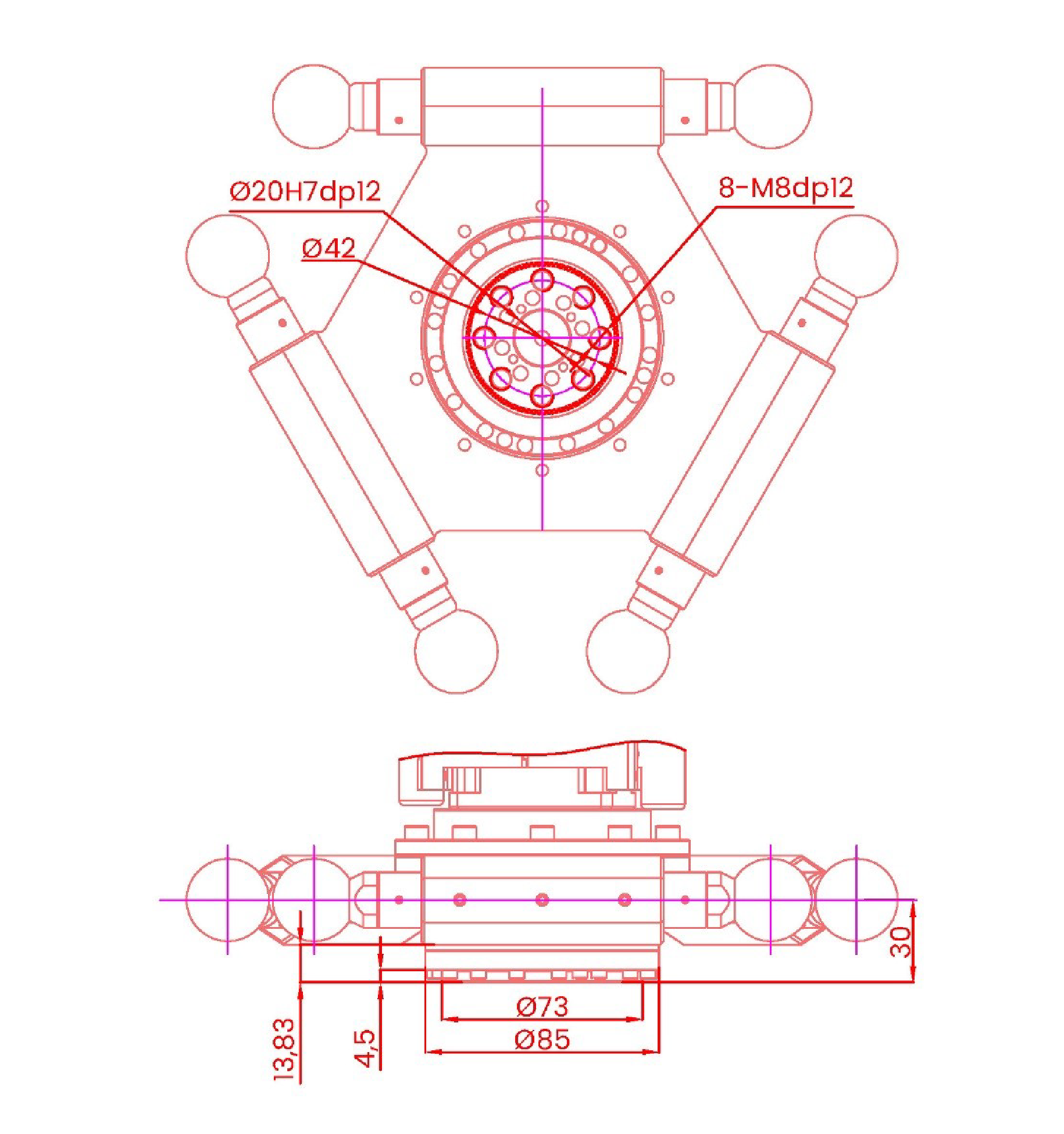
02. Flange(mm)
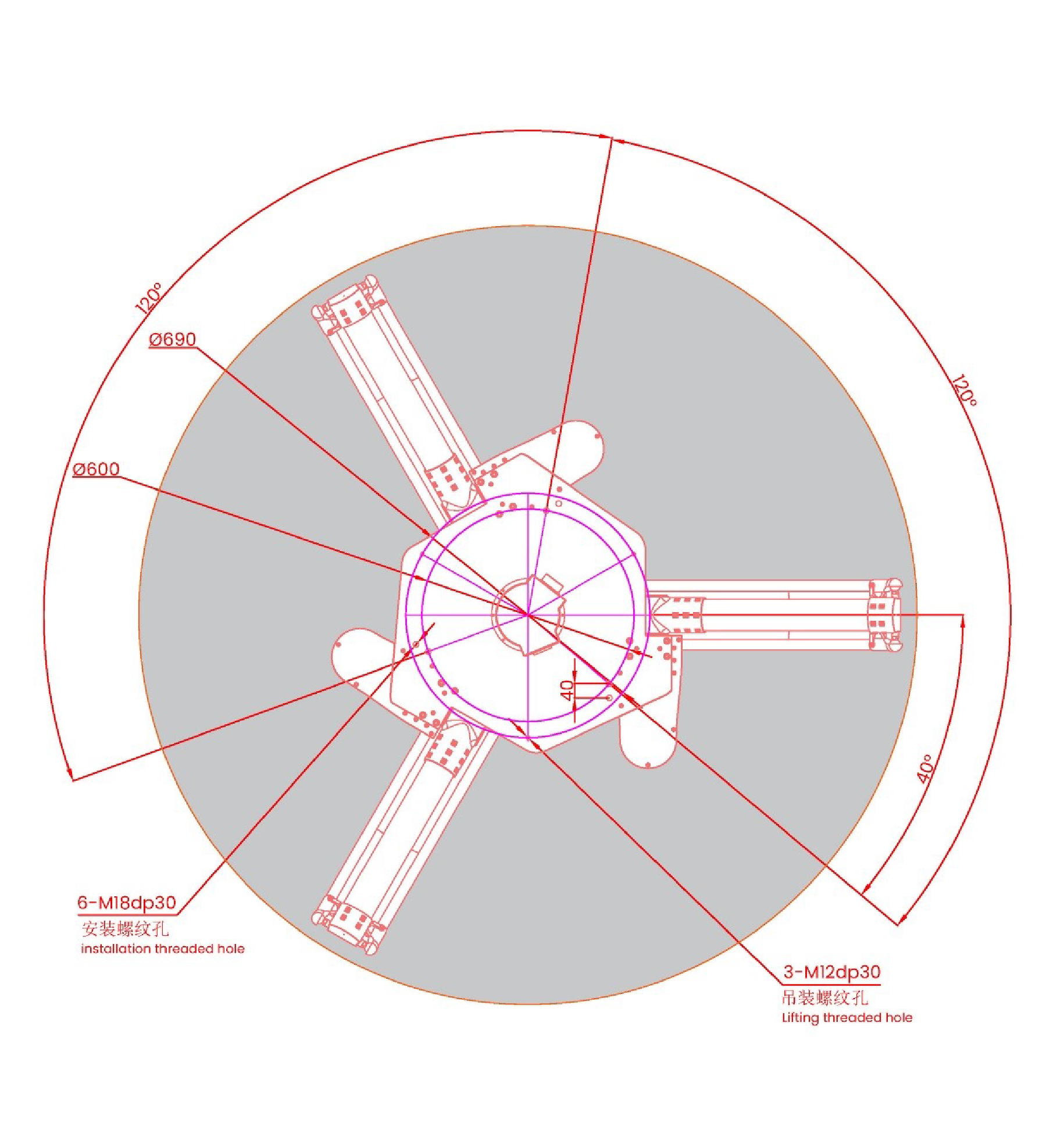
03. Hoʻokomo kumu (mm)
E kākau i kāu leka ma aneʻi a hoʻouna mai iā mākou





